2.2 Lingüística de las lenguas de signos
En esta sección hacemos una revisión de las características lingüísticas de la LS, con especial atención a la LSE. Empezamos con unas breves notas generales, para luego sumergirnos en un repaso rápido de su gramática y sintaxis, con especial referencia al uso distintivo del espacio. Finalmente, nos detenemos un poco más en la descripción fonológica, donde la divergencia respecto a las lenguas orales es más notable.
Como punto de partida, es esencial destacar que las lenguas de signos no constituyen una invención artificial reciente ni una simple codificación en gestos de la lengua oral. Son, en efecto, lenguas naturales que han surgido en las comunidades de personas sordas, tal como lo propulsó William Stokoe, el “padre” de la lingüística de las lenguas de signos (Stokoe 1960). Es más, la comunidad signante incluye no solo a individuos con deficiencias auditivas de diverso grado, sino también a sus familiares y amigos cercanos. Es relevante mencionar que, en ocasiones, los hijos de personas sordas no presentan deficiencias auditivas pero son, no obstante, hablantes nativos de la lengua de signos: los Coda (Children of Deaf Adults).
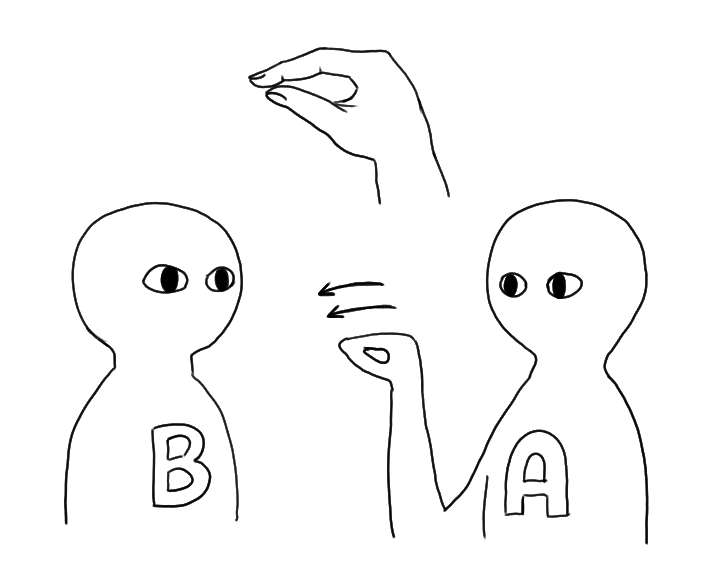
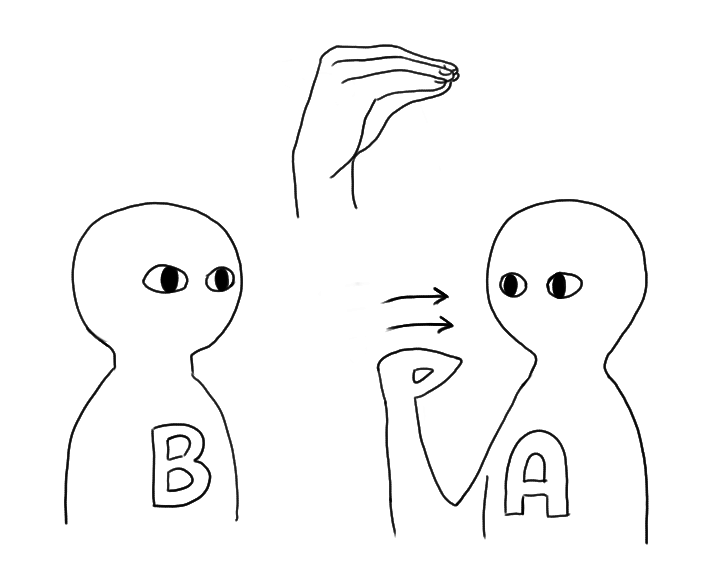
Tampoco son las lenguas de signos una mera mímica o teatralización de la realidad, sino que poseen una complejidad estructural que incluye léxico, gramática y una estructura interna bien definida (ver por ejemplo Hulst 2022). La figura 2.1 ofrece una transcripción de dos oraciones en Lengua de Signos Española. Acompañan a la transcripción explicaciones y observaciones sobre distintos rasgos lingüísticos, con el objetivo de presentar algunas de sus características más notables.

I.a, I.b – El signo deíctico, realizado señalando con un dedo, actúa en este caso como demostrativo de tercera persona. El gesto bucal con los labios abiertos pero los dientes cerrados es parte léxica del signo. Las distintas terceras personas se ubican en el espacio, señalándolas con el dedo e inclinando ligeramente el cuerpo. En español se han traducido con género para distinguirlos, pero en LSE no existe el género gramatical. En una situación real, lógicamente, los referentes estarían identificados en el contexto del discurso.
I.a, I.b, II.a, II.b – las cejas se alzan para marcar el tópico principal de la oración (no exactamente coincidente con el sujeto, nótese el tópico contrastivo “ahora/actualmente” en II.a).
I.c – El número gramatical es un fenómeno complejo en LSE debido a las interacciones con el espacio de signado, y no funciona como en otras lenguas a las que podamos estar acostumbrados. En este caso, por ejemplo, el signo “amigo” no tiene información de número, por lo que no tiene que concordar con el sujeto.
I – La oración copulativa en LSE no necesita de verbo principal, sino que se forma con la yuxtaposición del tópico principal (las dos terceras personas de I.a y I.b) y el atributo (I.c.), como ocurre también en lenguas orales como el ruso o el japonés.
II – En castellano, el sujeto de la segunda oración se puede omitir, al incluir el verbo principal información de persona con la que reconstruirlo. En LSE, en cambio, el sujeto es obligatorio (II.b), como en francés, inglés, o muchas otras lenguas.
II.b – el pronombre plural “ambos/los dos” incluye con su movimiento a los referentes que han sido colocados anteriormente en el espacio. Si los referentes estuvieran en otras posiciones (por ejemplo, incluyeran la primera o segunda persona) el movimiento y la orientación de la mano cambiaría para incluir los lugares sintácticos correspondientes. Si la cantidad de elementos del sintagma plural también fuera distinta, cambiaría también la configuración, usándose tres dedos para tres elementos y así sucesivamente.
II.c – la entrada léxica subyacente para el adverbio “siempre” incluye movimientos circulares consecutivos. No obstante, se pueden realizar menos o más repeticiones, o repeticiones incompletas, para ajustar el signo a la velocidad y ritmo del discurso, o para añadir matices al significado.
II.d – la expresión facial intensifica la acción. Combinado con “siempre” de II.c, la traducción al castellano se ha elegido con el aspecto verbal continuo para reflejar el matiz correcto. En ocasiones la expresión facial es parte léxica del signo, en otros casos es información sintáctica (como en el tópico principal, o en las oraciones interrogativas); también puede usarse para expresar la emoción del signante. En este sentido, la expresión facial y corporal actúan de manera muy similar a la entonación en la lengua oral.Que las LS sean lenguas naturales no puede sorprendernos. La necesidad de comunicación es intrínseca al ser humano, y las lenguas de signos representan una manifestación esperable de esta necesidad. No obstante, cabe destacar que el medio viso-gestual no es solo patrimonio de las comunidades sordas; Deacon (1997) llega a plantear que la comunicación gestual podría ser el origen de todo sistema lingüístico humano, y su presencia habitual en el contexto comunicativo de las comunidades oyentes refuerza este planteamiento.
En cuanto a su aparición y desarrollo, los estudios son concluyentes al demostrar su naturaleza igualmente “orgánica” o “natural” comparada con las lenguas orales. A. Senghas y Coppola (2001) ofrece un relato fascinante de la emergencia de una lengua de signos en Nicaragua, en el que niños sordos escolarizados de forma separada desarrollaron un sistema lingüístico desde cero. Esta observación directa confirma que las lenguas de signos son lenguas humanas legítimas, con la misma naturalidad que sus contrapartes orales. Sandler et al. (2014) amplía este cuerpo de evidencia con ejemplos adicionales.
Como lenguas naturales, las LS también tienen una genealogía propia, en la que la Lengua de Signos Francesa (Langue des Signes Française, LSF) ostenta un papel prominente. A través de la influencia de educadores franceses para sordos, la LSF ha dado origen a diversas lenguas de signos en todo el mundo, incluida la Lengua de Signos Americana (American Sign Language, ASL), que hoy en día tiene una presencia significativa en los medios audiovisuales. Como dato interesante, la ASL no está emparentada con la Lengua de Signos Británica (British Sign Language, BSL), demostrando la independencia de las LS del contexto oral. En España, la LSE es ampliamente utilizada en el territorio nacional y goza de reconocimiento oficial1, al igual que la Lengua de Signos Catalana (LSC). Plann (1997) nos remite a una de las referencias más antiguas en el ámbito de la educación para personas sordas, localizada precisamente en nuestro país, y Parkhurst y Parkhurst (2001) ofrece un análisis comparativo de las variaciones dialectales en España.
2.2.1 Visión de conjunto gramatical
Aunque no se deriven directamente de las lenguas orales, las lenguas de signos comparten con ellas numerosas características que posibilitan su análisis mediante el aparato teórico de la lingüística. La descripción subsiguiente es una síntesis propia que se nutre de múltiples fuentes académicas, entre las que destacan Brentari (2019), Branchini y Mantovan (2020) y Quer, Pfau, y Herrmann (2021), y sobre todo Herrero Blanco (2009), cuyo trabajo constituye una descripción gramatical exhaustiva y meticulosa de la Lengua de Signos Española. Se han incorporado referencias adicionales donde se han estimado pertinentes para enriquecer el argumento.
Las diferencias fundamentales entre las lenguas de signos y las lenguas orales vienen sobrevenidas principalmente del uso único del espacio y el movimiento por las LS (Rodrı́guez Redondo et al. 2008). Adicionalmente, es crucial señalar la variabilidad y grados de libertad de los articuladores utilizados—tales como manos, cuerpo y cara—en comparación con la predominancia del aparato fonador, menos multifacético, en las lenguas orales. Estas diferencias son particularmente evidentes a nivel de expresión superficial pero tienden a atenuarse a medida que ascendemos en los niveles de abstracción del lenguaje. De hecho, a nivel cognitivo, las diferencias son mínimas o quizás inexistentes, más allá de la variación interlingüística que podría esperarse.
Desde un enfoque macroestructural, las lenguas de signos no muestran divergencias significativas respecto a las lenguas orales en términos de organización discursiva. El uso del espacio se manifiesta principalmente para representar lugares o conceptos de manera icónica, así como el transcurso del tiempo (Stamp, Dachkovsky, y Sandler 2020). El discurso se articula de forma secuencial, mediante oraciones independientes que estructuran la información según un patrón de tópico-foco. Los marcadores no manuales, como el alzamiento de cejas o la inclinación de la cabeza, sirven para demarcar el tópico principal de la oración (Kimmelman 2015; Aarons 1996). Aunque este fenómeno puede parecer exótico, muy distinto al español o el inglés, es en cambio similar a la estructura informativa del japonés, que inicia también las oraciones con el tópico principal, y lo marca explícitamente con la partícula は (pronunciada en este caso como ~wa).
También como en japonés (y otras lenguas), en las lenguas de signos el verbo suele ocupar la posición final de la oración. Sin embargo, es relevante señalar que el orden de los complementos se presenta de manera inversa a lo que se suele encontrar en lenguas de este tipo. A pesar de estas particularidades, la sintaxis y las categorías gramaticales de las LS son plenamente compatibles con los paradigmas de análisis establecidos en la lingüística de las lenguas orales, aunque el uso del espacio sigue estando presente, y es fundamental incorporarlo como un rasgo morfológico y sintáctico crucial (Barberà Altimira 2015).
Los distintos lugares del espacio de signado se pueden utilizar para “ubicar” referentes, lo que permite hacer referencia a ellos posteriormente al señalar su posición correspondiente (Tkachman 2016). En este contexto, el espacio funciona casi como una especie de tercera persona, pero con posibilidades expresivas inexistentes en la lengua oral. Por ejemplo, el signante tiene la opción de mover el torso para “situarse” en uno de estos roles de tercera persona, lo que da lugar al habla en estilo directo o “cita”. Este movimiento sutil, además, tiene un impacto fonológico en todas las formas presentes en el texto citado, modificando su estructura espacial para adecuarse al nuevo “signante”.
Adicionalmente, numerosos verbos pueden “conjugarse” espacialmente, mediante la modificación o adición de un desplazamiento al signo para que comience, pase por o termine en diferentes espacios del espacio de signado. Estos espacios señalados se convierten en los argumentos del verbo, llenando las casillas correspondientes de sujeto, objeto, etc., de acuerdo con el orden en que aparecen (Holler y Steinbach 2018). Es también viable formar sintagmas nominales múltiples que son más expresivos que los permitidos por las conjunciones de la lengua oral, simplemente mediante la distribución y agrupación significativa de referentes en el espacio. Aunque estos aspectos no representan desafíos insuperables para la lingüística, lo cierto es que aún no existe un marco teórico consolidado que aborde de manera integral el uso del espacio en las lenguas de signos2.
En términos fonológicos y fonéticos, las lenguas de signos divergen considerablemente de las lenguas orales. De hecho, hay quienes argumentan en contra del uso del término “fonología” debido a sus connotaciones oralistas (Lucas y Valli 1989; Sutton-Spence y Woll 1999) y prefieren emplear el término “quirología” (contrastando la etimología griega para mano, χείρ ~kheír, con sonido, φωνή ~foné). Independientemente de la nomenclatura, existe un nivel de análisis en las lenguas de signos, vinculado al medio físico, que encuentra su equivalente en la fonología y la fonética de las lenguas orales. En estas últimas, el canal de transmisión principal es el auditivo, basado en una onda de presión unidimensional, lo que configura su naturaleza lineal. En cambio, en las lenguas de signos el canal de transmisión es viso-gestual, y se apoya en la visión y el movimiento tridimensionales. Los articuladores en las LS son también más numerosos que en las lenguas orales (ambas manos, el cuerpo, la cara, etc.) y operan de manera paralela y relativamente independiente. Esta multiplicidad confiere a las lenguas de signos una calidad de simultaneidad que no es inherente a la lengua oral, además de un gran rango de posibilidades expresivas. Es por ello que la descripción fonológica resulta frecuentemente el tema más prominente en la investigación lingüística de las LS, y también por ello le dedicamos la siguiente sección.
2.2.2 Modelo fonológico QOLDF
Los gestos lingüísticos paralelos y simultáneos que mencionábamos, y que conforman los signos en las LS, son organizados por la mayoría de los autores en torno a varios rasgos fundamentales. Tanto la mano dominante como la no dominante (si se utiliza) adquieren valores específicos para cada uno de los rasgos de configuración (Q), orientación (O) y lugar (L). La configuración es el rasgo que describe la disposición de los dedos, ofreciendo distintas “formas” o configuraciones de la mano. Este rasgo muestra una variabilidad significativa entre las diferentes lenguas de signos, tanto en términos del inventario de configuraciones utilizadas como en los rasgos que se consideran distintivos. En el caso de la LSE, el repertorio de configuraciones es algo superior al medio centenar, aunque hay cierta discrepancia en el listado entre diferentes autores.
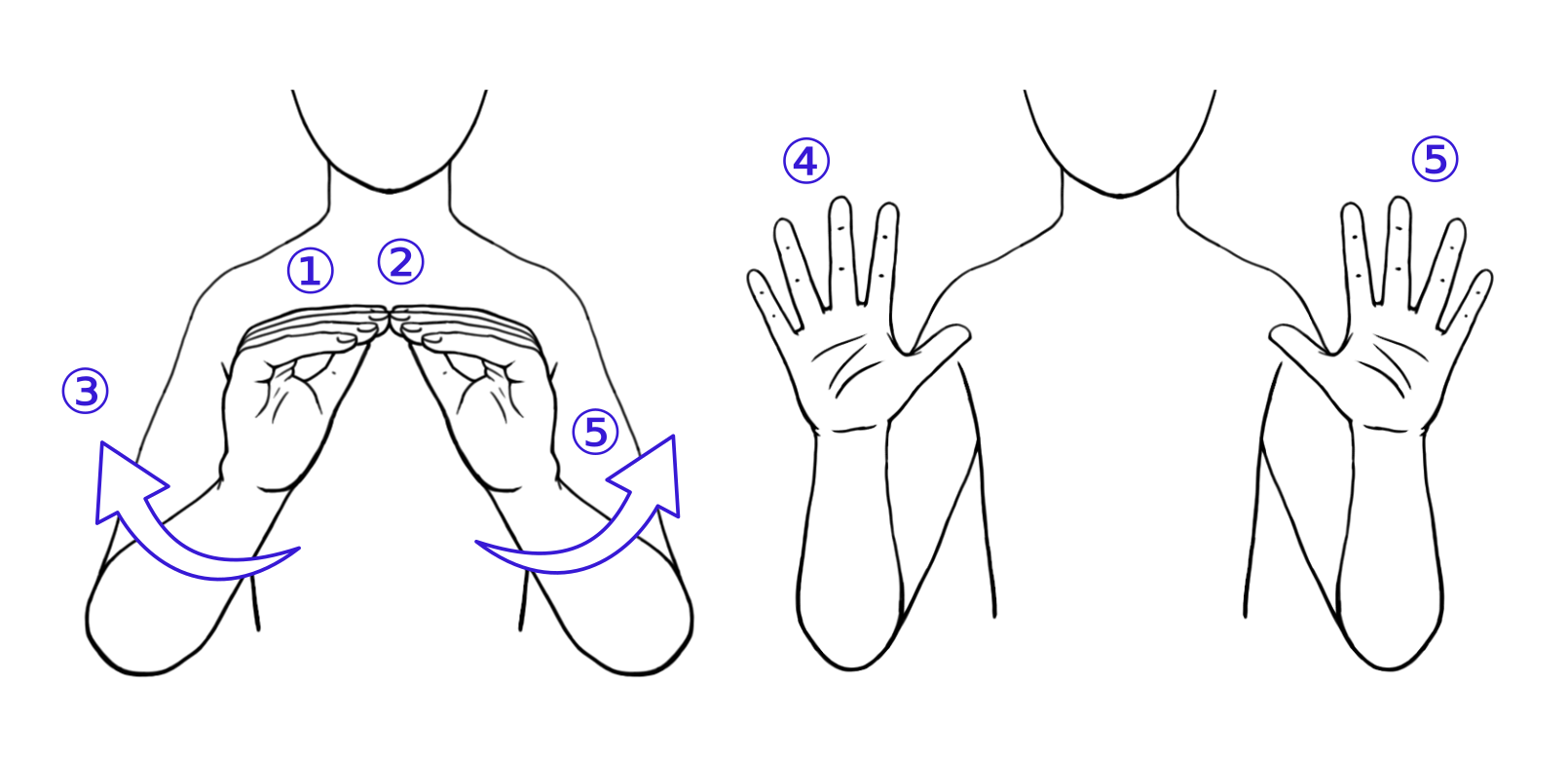
Además de la configuración, la orientación de la mano en el espacio constituye otro rasgo de relevancia lingüística (ver figura 2.2). Algunos investigadores, como Herrero Blanco (2009), abordan este rasgo centrándose en la rotación de la muñeca. Sin embargo, la dirección en la que la mano apunta puede tener relevancia sintáctica, lo cual nos llevó a proponer una perspectiva alternativa en Sevilla y Lahoz-Bengoechea (2019). El tercer rasgo “espacial”, denominado lugar, especifica la ubicación de la mano, ya sea en relación al cuerpo del signante o dentro del espacio de signado. Es también crucial determinar si existe o no contacto, ya sea con el cuerpo del signante o con la mano no dominante.
Adicionalmente a estos rasgos “estáticos” (QOL), los signos suelen incorporar algún elemento de movimiento. Autores prominentes, incluyendo a Herrero Blanco, distinguen entre movimientos formales (F) o internos de la mano (como giros o cambios en la flexión de los dedos) y movimientos “externos” o desplazamientos (D), que implican cambios en la ubicación de las manos. Es fundamental además definir rasgos que determinen qué manos se utilizan, cuál es la relación entre ellas (por ejemplo, si son simétricas o si una sirve de apoyo a la otra) y si el movimiento se repite y de qué manera. Herrero Blanco, sin embargo, agrupa todos estos elementos bajo la categoría general de movimientos (M).
En la figura 2.3 se ilustran sobre un ejemplo los diversos parámetros que hemos discutido. No obstante, es importante no olvidar las expresiones faciales y corporales. Aunque suelen ser obviadas por muchos autores debido a la dificultad de su análisis y su impacto relativamente menor, tienen la capacidad de portar significado tanto a nivel léxico como prosódico y paralingüístico. Kocab, Senghas, y Pyers (2022), por ejemplo, describen un caso de estudio sobre la emergencia y fijación gramatical de los marcadores no manuales en las oraciones interrogativas de la lengua de signos emergente en Nicaragua.
Este enfoque basado en rasgos que hemos visto está bastante extendido, pero existen otras aproximaciones a la descripción lingüística que plantean propuestas alternativas. Liddell y Johnson (1989) sugiere un modelo fonológico renovado para el movimiento de las manos, centrado en un patrón alternante de gestos estáticos y dinámicos, y Tyrone et al. (2010) ofrece otro enfoque basado en el paradigma contemporáneo de la fonología articulatoria.
Como hemos visto, los múltiples rasgos fonológicos y la utilización del espacio constituyen características lingüísticas singulares de las lenguas de signos. Aunque algunas veces es posible describirlas con terminología lingüística ya existente, a menudo presentan notables diferencias con respecto a sus homólogos orales. No obstante, estos rasgos son esenciales para capturar la totalidad de su gramática y significado, lo cual resulta indispensable si se aspira a un tratamiento computacional efectivo de las lenguas de signos.
Para ello, se requiere de una representación digital más robusta que la que proporcionan las glosas. Estas son palabras de una lengua oral que traducen, con mayor o menor exactitud, el significado de los signos y que se pueden emplear para representar una oración signada como una secuencia de “palabras”. Sin embargo, esta estrategia resulta insuficiente para capturar los rasgos espaciales y dinámicos que son fundamentales tanto a nivel sintáctico como semántico en las lenguas de signos.
Adicionalmente, las glosas son incapaces de capturar la fonología inherente a los signos. Si nuestro objetivo es procesar la lengua a nivel del medio viso-gestual —como sería en el caso de reconocimiento de vídeo o la generación de avatares signantes— es imprescindible representar de manera fidedigna los distintos rasgos que conforman los signos. Para esto, no podemos depender de la lengua oral como sustituto, sino que se hace necesario recurrir a una representación específica que respete las particularidades de las lenguas de signos, y en la siguiente sección veremos distintas opciones para ello.